
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

ထုတ်ကုန်များ
- စွမ်းအားမရှိသော Roller Conveyor စီးရီးများ
- ကတ်ကြေးအမျိုးအစား Hydraulic Lifting Table Series
- Intelligent Factory Furniture Production Line Series
- Intelligent Packaging Line Series
- Powered Belt Conveyor Series
- Intelligent Factory Furniture Production Line Series Single Machine
- Roller စီးရီး
- တံခါးဖြေရှင်းချက်
- အလိုအလျောက်ပန်းကန်သန့်ရှင်းရေးစက်





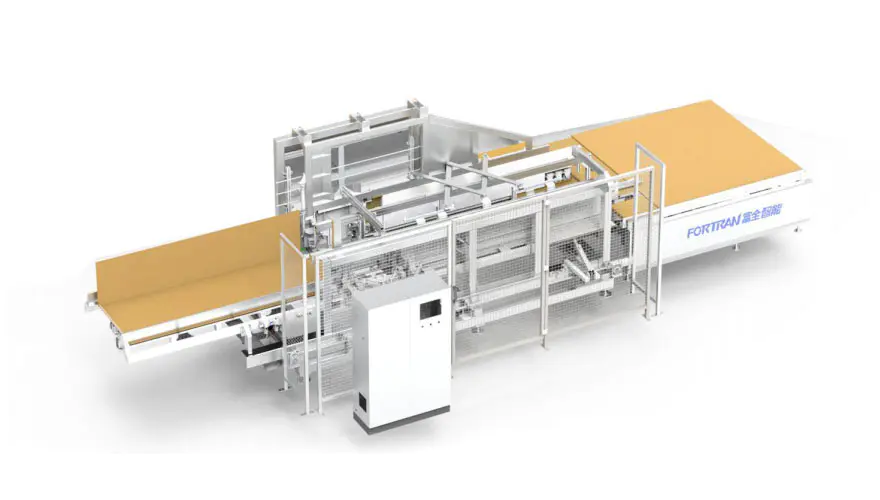
အလိုအလျောက် box ခေါက်စက်
ဤအလိုအလျောက် box ခေါက်စက်ကိုပုံးထဲထည့်သွင်းထားသည်။ ငါတို့သည်သင်တို့နှင့်အတူပူးပေါင်းရန်မျှော်လင့်, သင်ပိုမိုသိလိုပါကသင်ယခုတိုင်ပင်ဆွေးနွေးနိုင်ပါတယ်, သင်အချိန်မီပြန်ပြောပါလိမ့်မယ်!
စုံစမ်းမေးမြန်းရန်ပေးပို့ပါ။
ကုန်ပစ္စည်းအကြောင်းအရာ
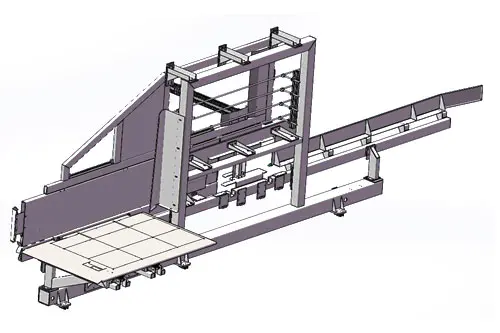
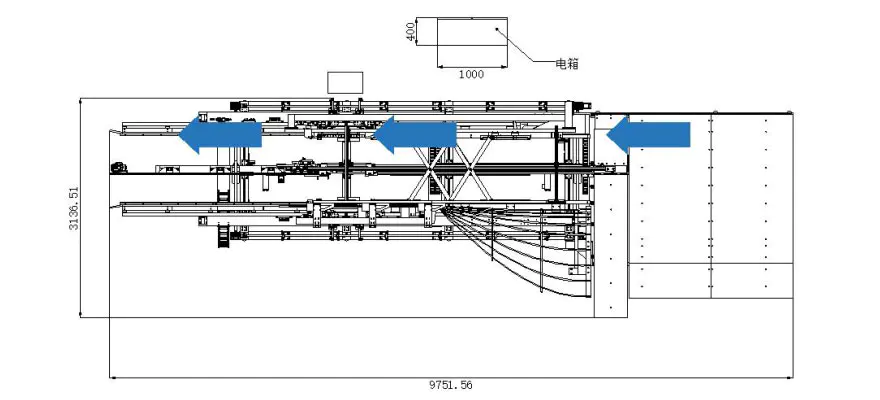
ခြုံငုံစက်ပုံရိပ်
ပစ္စည်း parameters တွေကို
| ပြင်ပအတိုင်းအတာ l * w * ဇ (မီလီမီတာ) |
ကိုယ်အလေးချိန်ကိုအလေးချိန် (ကီလိုဂရမ်) | ပါဝါထောက်ပံ့ရေး (KW) | သယ်ယူပို့ဆောင်ရေးဝန် (ကီလိုဂရမ်) | အလုပ်လုပ်အမြင့် (MM) |
| 9760 * 3550 * 2500 | အကြောင်းကို 3700 | 4.5kw (gluity ယူနစ်ဖယ်ထုတ်ခြင်း) |
50 | 830 ± 40 (မသေချာမရေရာသော။ ဖောက်သည်အပေါ်မူတည်သည် |
processing scope
| Carton processing range l (MM) | Carton အပြောင်းအလဲနဲ့အကွာအဝေး W (မီလီမီတာ) | Carton Prousing Range H (MM) | ခေါက်ထိရောက်မှု (Times / Min) | မုန့်ချွဲစက္ကူအထူ (MM) |
| 400-2800 | 320-900 | 40-250 | 5-7 | 2.5-6 |
ထုတ်ကုန်အင်္ဂါရပ်များ
1 အဓိကဆက်စပ်ပစ္စည်းများအမှတ်တံဆိပ်: servo motor - inovance; synchronous belt - ardner; ထိုင်ခုံ bearner - tr; freeds seption - tr
2 ခြုံငုံသောထိန်သိမ်းပိုက်သည်အလွန်တိကျမှန်ကန်သော,
3 ခေါက်သေတ္တာစက်၏ linear ယန္တရားသည်အလွန်စိတ်ချရသောနှင့်ကြာရှည်ခံသောတိကျသော linear လမ်းညွှန်ရထားလမ်းဖြင့်လမ်းညွှန်သည်။
4 စုတ်ယူခြင်းဖျားချက်စက္ကူသည်ထိန်းချုပ်ရန်လွယ်ကူသောမြင့်မားသော servo motor ကိုအသုံးပြုသည်။ ၎င်းသည်ပစ္စည်းကိရိယာများ၏တိကျမှန်ကန်မှုကိုတိုးတက်စေနိုင်သည်။
5 စက်ကိုတစ် ဦး တည်းသို့မဟုတ်စိတ်ကြိုက်ထုပ်ပိုးမျဉ်းနှင့်အတူပေါင်းစပ်နိုင်ပါတယ်။ အသုံးပြုမှုနည်းလမ်းသည်ပြောင်းလဲခြင်းနှင့်ပြောင်းလွယ်ပြင်လွယ်သည်
လုပ်ဆောင်ချက်
1 အသုံးပြုသည်
A. ဤအလိုအလျောက် box ခေါက်စက်ကိုပုံးထဲထည့်သည်။
(ခ) ဤပစ္စည်းကိရိယာများကို M / A-0410 မော်ဒယ်သေတ္တာများကိုသေတ္တာများပြုလုပ်ရန်အသုံးပြုသည်။
C. ပုံးကို Benchmark လုပ်ပါ, သက်ဆိုင်ရာ input siz ကိုနှိပ်ပြီးစတင်ပါ, သေတ္တာတစ်လုံးကိုအလိုအလျောက်ပြုလုပ်ရန်ပစ္စည်းကိရိယာများကိုထည့်ပါ။
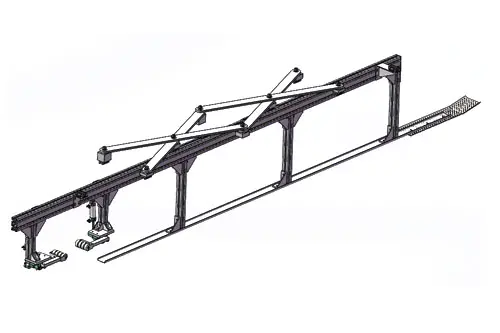
2 အလုပ်လုပ်နိယာမ၏ခြုံငုံသုံးသပ်ချက်
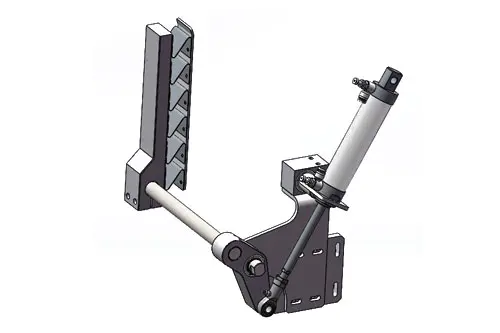
ပစ္စည်းကိရိယာတစ်ခုလုံးကိုအပိုင်းငါးပိုင်းခွဲထားသည် - အစာကျွေးခြင်းပလက်ဖောင်းယန္တရား, အဓိကဘောင်ယန္တရား, fixed side tolding ယန္တရား, ယန္တရား:
A. အလုပ်လုပ်သည့်အခါစစ်ဆင်ရေးမျက်နှာပြင် input သည် tolding box ၏အရွယ်အစားနှင့်ကိုက်ညီသည်။ positioning အဆင်သင့်ဖြစ်ပြီးနောက်စက္ကူအရေပြားကိုရှေ့အခြေခံစံနှုန်းနှင့်ဘေးထွက်အခြေခံစံနှုန်းများနှင့်ကိုက်ညီပြီးသည့်နောက်တွင်အပြုသဘောဆောင်သော box ကိုစက်ပိုင်းထဲ၌စုပ်ယူရန်စုပ်ယူထားသောဖလားကိုအလိုအလျောက်စုပ်ယူရန်အစိမ်းရောင် Start ခလုတ်ကိုနှိပ်ပါ။
(ခ) စုပ်ယူထားသောဖလားသည်စက္ကူအရေပြားကိုခေါက်ခြင်းအပိုင်းသို့မောင်းနှင်ထားပြီးသတ်မှတ်ထားသောအစွန်းနှင့်ရွေ့လျားနေသောရှည်လျားသောအစွန်းသည်ကော်ကော်မှုန်ရေမွှားအနေအထားတွင်အလိုအလျှောက်ကော်ဖီနှင့်ကိုက်ညီပြီး,
C. ရှေ့အပိတ်သေတ္တာသည်သတ်မှတ်ထားသောအနေအထားသို့ရောက်သောအခါ, ဆလင်ဒါ၏အောက်ဖက်ဖိအားတင်းကျပ်လာပြီးနောက်ဆလင်ဒါ၏အောက်ဖက်ဖိအားတင်းကျပ်လာပြီးနောက်, သတ်မှတ်ထားသောဘက်နှင့်ရွေ့လျားနေသောဘေးထွက်အစွန်းအလုပ်မလုပ်သည့်အခါတစ်ချိန်တည်းတွင်ရွေ့လျားနေသောဘေးထွက်အစွန်းအလုပ်မလုပ်ပါက flip Group သည်ပြီးစီးပြီးနောက်ပြန်လည်စတင်သည်။ နောက်ခံဇာတ်ကြောင်းအစုအဝေးဖလားသည်စက္ကူအရေပြားကိုနောက်ခံခေါက်ခြင်းအကွက်၏ပုံသွင်းသည့်အနေအထားသို့ရှေ့သို့မောင်းနှင်ပြီးသတ်မှတ်ထားသောအနေအထားသို့အလိုအလျောက်ကော်) ကိုအလိုအလျောက်လိမ်း။ ,
3 functional ဖွဲ့စည်းပုံ "
-
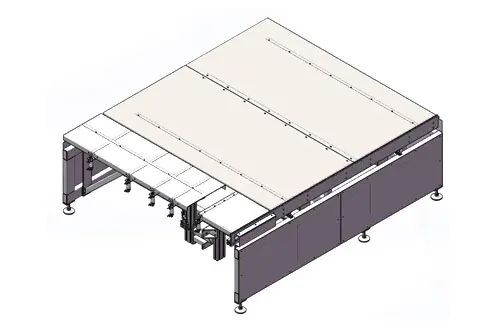
စားပွဲပေါ်မှာအစာကျွေးခြင်း
-
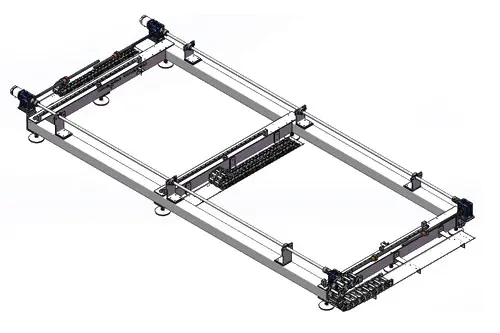
အခြေခံဖွဲ့စည်းပုံ rack
-
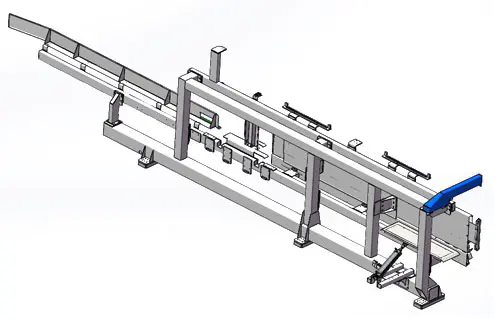
Fixed ဘက်ခြမ်းခေါက်ထိန်သိမ်း set ကို
-
Mobile Side ခေါက်စက်အစုံ
-

ပျမ်းမျှ drive ယန္တရား၏ငါးပိုင်း
-
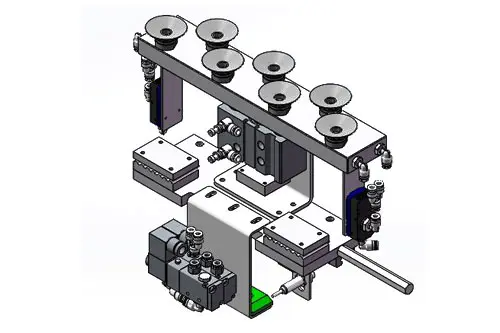
အလယ်အလတ်အဆင့်စုပ်ယူထားသောခွက်အုပ်စု
-
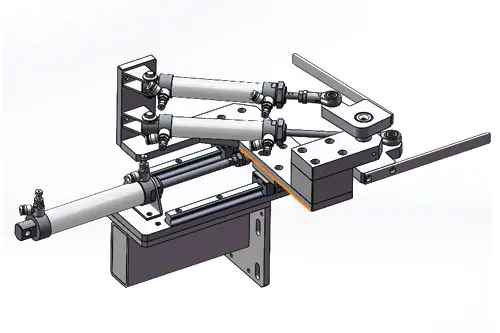
ခေါက်တိုးချဲ့အုပ်စု
-
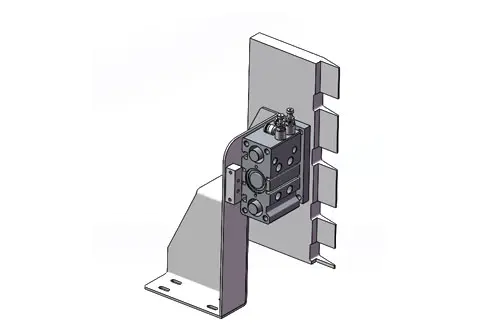
Plate Group ကိုနှိပ်ပါ
-
ဘေးထွက် - လှည့်အုပ်စု
-

Swing ARM နားထိုင်ခုံအုပ်စု
-
အလယ်အလတ်အဆင့်အရန်အစွန်းဖိအားအုပ်စု
-
ကော်စက်စနစ်
| နံပါတ်စဥ် | နံမယ် | ထူးခွားတဲ့အင်္ဂါရပ် | ပုံစံ |
| 1 | စားပွဲပေါ်မှာအစာကျွေးခြင်း | ရှေ့တန်းပစ္စည်းဇယားကိုဘုတ်အဖွဲ့အနေအထားတွင်နေရာချထားပြီးဆလင်ဒါသည်ရုတ်သိမ်းခြင်းနှင့်နေရာချထားရေး pin ကိုထိန်းချုပ်သည်။ ဘေးထွက် servo motor သည်စက္ကူအရေပြားအစာပြင်ဆင်ခြင်းအနေအထားကိုတိကျစွာတည်ရှိသည်။ |
|
| 2 | အခြေခံဖွဲ့စည်းပုံ rack | Mainframe Rack ၏အခြေခံသည် Servo Linkage Control Servo Motor Drive မိုဘိုင်းခေါက်စက်နှင့်ပျမ်းမျှ drive ယန္တရားသည်ပိုမိုတိကျသည်။ |
|
| 3 | Fixed ဘက်ခြမ်းခေါက်ထိန်သိမ်း set ကို | Fixed Side ခေါက်ဆွဲဘောင်, တိုတောင်းသောအစွန်းဆလင်ဒါခေါက်ခြင်း, စာရွက်များကိုနှစ်ဖက်စလုံးတွင်ခင်းထားသောဂဟေဆော်ခြင်း, |
|
| 4 | Mobile Side ခေါက်စက်အစုံ | ဘေးထွက်ခေါက်ဘောင်, ရှည်လျားသောဘေးထွက်ဆလင်ဒါခေါက်ခြင်း, နှစ်ဖက်စလုံးတွင်စာရွက်သတ္တုဆွေဂီအရန်လမ်းညွှန်; မြင့်မားသောစည်းဝေးပွဲဂန္ထဝင်ဆိုးရွားသော, စစ်ဆင်ရေး၏မြင့်မားသောစစ်ဆင်ရေး, |
|
| 5 | ပျမ်းမျှ drive ယန္တရား၏ငါးပိုင်း | servo control drive, အလယ်အလတ်အနိုင်ရိုက်ကူးခဖီးအုပ်စုသည်စက္ကူအရေပြားလှုပ်ရှားမှုတွင်မောင်းနှင်သည့်ပစ္စည်းကိုမောင်းနှင်သည်။ |
|
| 6 | အလယ်အလတ်အဆင့်စုပ်ယူထားသောခွက်အုပ်စု | Servo Motor ၏ခါးပတ်သည်လှုပ်ရှားမှုကိုမောင်းနှင်နိုင်ပြီးဆလင်ဒါဖုန်မှုန့်များသည်အနိမ့်အမြင့်ရှိပြီး Vacuum သည်စက္ကူအသားအရေထုတ်လွှင့်ခြင်း, |
|
| 7 | ခေါက်တိုးချဲ့အုပ်စု | ရှေ့နှင့်နောက်ဆလင်ဒါတိုးချဲ့ခြင်းသည်နောက်ပြန်လှည့်ရန်လမ်းရထားလမ်းနှင့် ပူးပေါင်း. Guide Treaming Guide Reading နှင့်ပူးပေါင်းပြီးအုပ်စုလိုက်ဆလင်ဒါလက်မောင်းယန္တရားသည်ကွဲပြားခြားနားသောသတ်မှတ်ချက်များနှင့်အရွယ်အစားများခေါက်ခြင်းကိုသတိပြုမိသည်။ |
|
| 8 | Plate Group ကိုနှိပ်ပါ | အဆိုပါဆလင်ဒါသည်မတိုင်မီနှင့်ပြီးနောက်ချဲ့ထွင်ခြင်းနှင့် box ကိုညာဘက်ထောင့်အဖြစ်ဖြောင့်ရန်နား၏ကွေးအပေါ်ပြုမူ; |
|
| 9 | ဘေးထွက် - လှည့်အုပ်စု | ၎င်းသည်ရှေ့နှင့်နောက်ဘက်စွန်းများကိုအထက်သို့တက်ခြင်းအတွက်အဓိကတာဝန်ရှိကြောင်းနှင့်ဆလင်ဒါတယ်လီကုပ်ထုတ်လွှင့်ခြင်းကလှုပ်ခါနေသောကော်တင်းသည်ခိုင်မြဲစွာနှင့်တည်ငြိမ်သောကြောင့်ဆလင်ဒါလက်မောင်းသည်လက်မောင်းကိုမောင်းနှင်သည်။ |
|
| 10 | Swing ARM နားထိုင်ခုံအုပ်စု | ဆလင်ဒါ drive ကိုချဲ့ထွင်ခြင်းကလွှဲသံကိုမောင်းနှင်သည်။ Swing ARM ကိုညာဘက်ထောင့်တစ်ခုတွင်နေရာချပြီးနောက်အောက်ပိုင်းဖိအားဆလင်ဒါသည်စက္ကူအရေပြားကိုထိမိပြီးဘေးထွက်အလှည့်အပြောင်းများကဖိအားပေးမှုပူပြင်းသည့်စိတ်ဓာတ်ကျခြင်းဖြင့်ပြုလုပ်နိုင်သည်။ |
|
| 11 | အလယ်အလတ်အဆင့်အရန်အစွန်းဖိအားအုပ်စု | ရှည်လျားသော Swing Arm သည်ပုံးအလယ်တွင်အပြည့်အဝအလိုအလျောက်အလယ်အလတ်အနေအထားကိုရရှိရန်လမ်းညွှန်ရထားလမ်းနှင့် ပူးပေါင်း. ရှေ့ပြေးပစ္စည်းသည်စက္ကူအရေပြားကိုကူညီရန်အနိမ့်အမြင့်ဆုံးနှင့်နောက်ဖက်ရှိအုပ်စုများကိုကူညီသည်။ |
|
| 12 | ကော်စက်စနစ် | ကော်စက်စနစ်တွင်ကျွန်ုပ်တို့သည်ကော်ကော်ပက်ဖြန့်ခြင်း, ပြီးပြည့်စုံသောလုပ်ဆောင်မှုများ, |
|
အမြင်သုံးခု (အရွယ်အစားပြောင်းလဲမှုသည် parametersters အရပြောင်းလဲခြင်း)
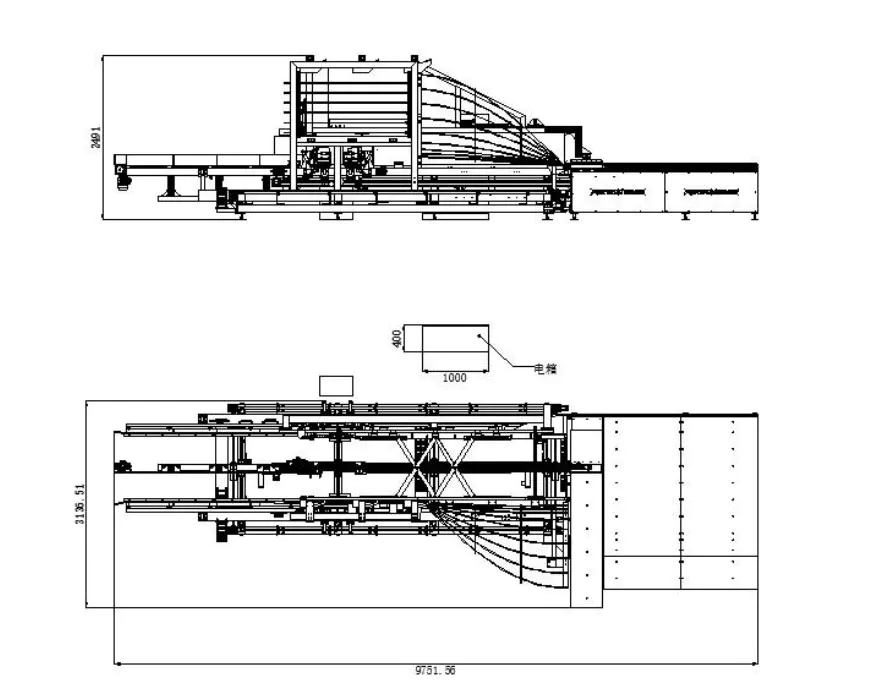
ထုတ်လုပ်မှုလုပ်ငန်းစဉ်စနစ်၏အစီအစဉ်ပုံစံ (အရွယ်အစားသည်အရွယ်အစား parameters တွေကိုအဆိုအရပြောင်းလဲမှုများ)
Hot Tags: အလိုအလျောက် box ခေါက်စက်
ဆက်စပ်အမျိုးအစား
စွမ်းအားမရှိသော Roller Conveyor စီးရီးများ
ကတ်ကြေးအမျိုးအစား Hydraulic Lifting Table Series
Intelligent Factory Furniture Production Line Series
Intelligent Packaging Line Series
Powered Belt Conveyor Series
Intelligent Factory Furniture Production Line Series Single Machine
Roller စီးရီး
တံခါးဖြေရှင်းချက်
အလိုအလျောက်ပန်းကန်သန့်ရှင်းရေးစက်
စုံစမ်းမေးမြန်းရန်ပေးပို့ပါ။
ကျေးဇူးပြု၍ အောက်ပါပုံစံဖြင့် သင်၏စုံစမ်းမေးမြန်းမှုကို အခမဲ့ပေးပါ။ 24 နာရီအတွင်း သင့်အား အကြောင်းပြန်ပါမည်။







